Part A — Semantic Coherence: C₄ Detects What D² Cannot
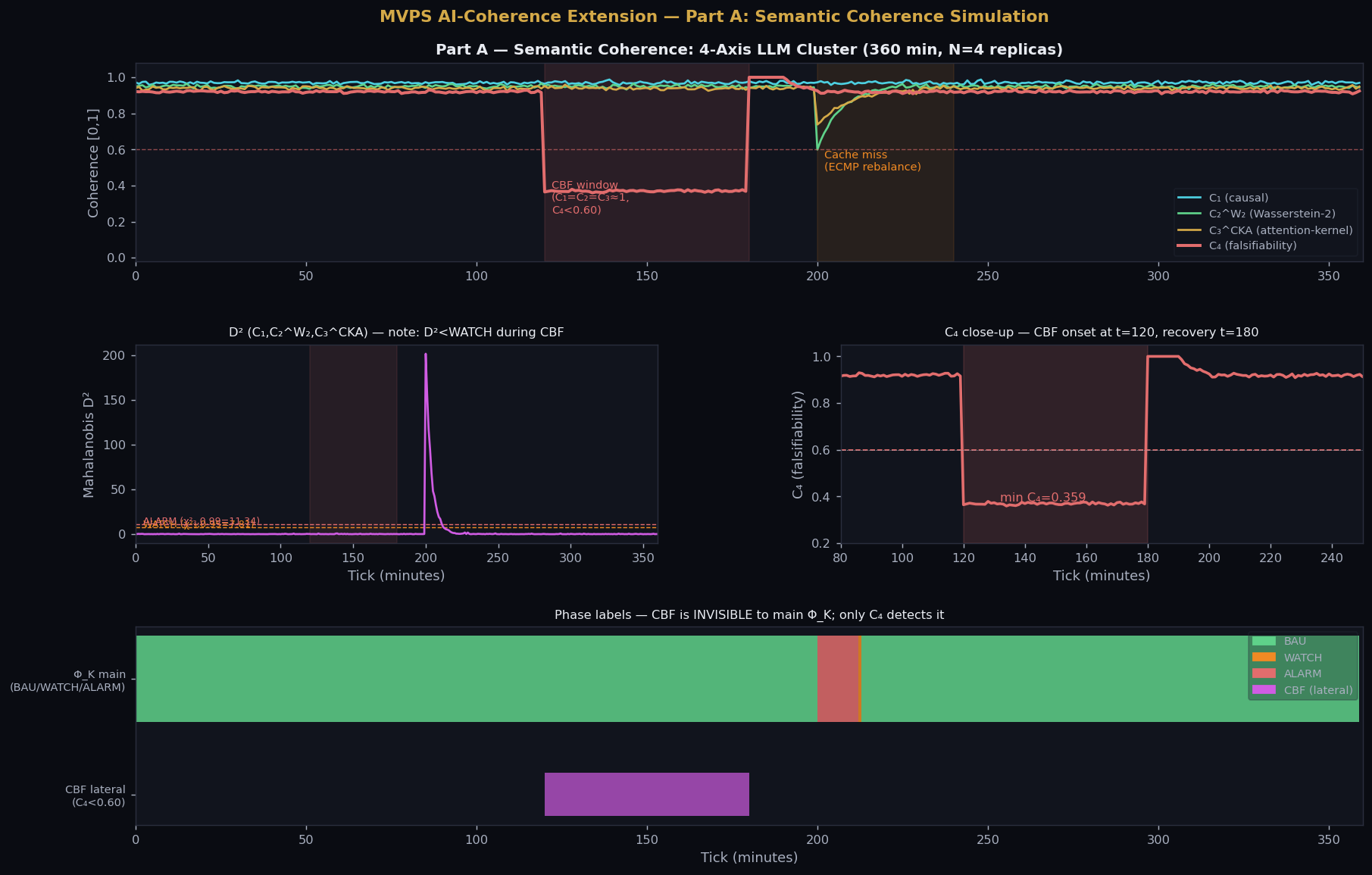
The defining result of Domain 2: during the COHERENT_BUT_FALSE (CBF) window (ticks 120–180, 60 minutes), the classic Mahalanobis distance \(D^2\) remains below the WATCH threshold (7.81), because \(C_1 \approx C_2^{W_2} \approx C_3^{CKA} \approx 1\) — all replicas agree. They agree on the wrong answer. Only \(C_4\) (falsifiability coherence) falls to 0.359, triggering the lateral CBF label.
Mechanism: Why C₄ Works
\(C_4\) measures perturbation stability:
During hallucination consensus, all replicas respond similarly to any prompt \(x\), but \emph{also} respond similarly to \(x + \delta\) — i.e., the perturbation does not change the (wrong) answer. The total variation collapses, but it collapses to the wrong distribution. \(C_4 \to 0\) because the model is unstable in the sense that it confidently hallucinates.
Einstein Parallel
Einstein: "Imagination is more important than knowledge." The classic MVPS observer knows that D² is low — all three axes agree. But the imaginative observer asks: "What happens if I perturb the input?" That is exactly what \(C_4\) measures. The system that cannot be surprised by perturbations is either perfectly calibrated — or permanently wrong. \(C_4\) distinguishes these two cases where \(D^2\) cannot.